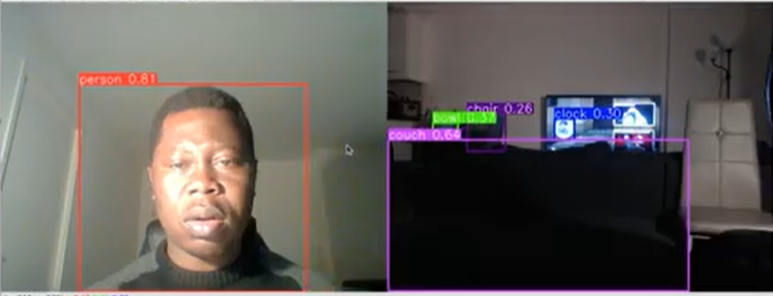
La détection d’objets en temps réel, utilisant le modèle YOLOv8 via la bibliothèque OpenCV. Ce script illustre comment YOLOv8, une évolution du populaire modèle YOLO pour la détection d’objets, peut être appliqué aux flux vidéo de deux caméras simultanément, offrant une solution puissante et flexible pour la surveillance et l’analyse vidéo en temps réel.
import cv2
from ultralytics import YOLO
# Load the YOLOv8 model
model = YOLO(‘yolov8n.pt’)
# Open the video file
video_path = “path/to/your/video/file.mp4”
cap = cv2.VideoCapture(0)
# Loop through the video frames
while cap.isOpened():
# Read a frame from the video
success, frame = cap.read()
if success:
# Run YOLOv8 inference on the frame
results = model(frame)
# Visualize the results on the frame
annotated_frame = results[0].plot()
# Display the annotated frame
cv2.imshow(“YOLOv8 Inference”, annotated_frame)
# Break the loop if ‘q’ is pressed
if cv2.waitKey(1) & 0xFF == ord(“q”):
break
else:
# Break the loop if the end of the video is reached
break
# Release the video capture object and close the display window
cap.release()
cv2.destroyAllWindows()

Related Posts